Как собрать робот, создающий художественные произведения
Содержание:
- Геометрическая аппликация своими руками
- Роботы-учёные
- Система передвижения
- Система распознавания образов
- Двигатели
- Математическая база
- Навигация
- Внешний вид
- Производители роботов
- Fischertechnik Robotics 544624 TXT Умный дом
- Печатная плата и электронные элементы
- Робот, различающий препятствия
- Что такое робот?
- Робот из картонных коробок
- Робот из «Лего»
- Робот из консервной банки с магнитом
- Как делать робота — пошаговые инструкции.
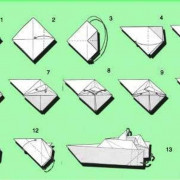
- Простой бумажный робот
- Что необходимо для занятий домашней робототехникой
- Материалы
- Робот из пластиковых бутылок
- Сдача советника – включайтесь в работу!
- Основной строительный материал
- Робот из крышечек
Геометрическая аппликация своими руками
И маленьким детям под силу справиться с заданием, делая весёлую аппликацию с рисунком робота, пользуясь геометрическими фигурами.
-
Поделки из ватных дисков — красивые идеи и советы как сделать украшения и игрушки своими руками (70 фото)
-
Новогодние поделки своими руками: 70 фото идей и мастер-класс изготовления поделок на праздник
- Поделки ко дню матери — как сделать своими руками простые и красивые оригинальные украшения и игрушки (130 фото + видео)
Предварительно следует сделать необходимые формы фигур на бумаге и вырезать их. Это могут быть различные по форме треугольники, круги или квадраты.
С помощью клеевого карандаша на бумажный лист приклеиваем вырезанные фигуры, делая детскую поделку робот. Маркером рисуем мелкие элементы и разукрашиваем фон.

Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
К роботам-учёным безусловно можно отнести роботов, с помощью которых исследовались вентиляционные шахты Большой Пирамиды Хеопса. С их помощью были открыты т. н. «дверки Гантенбринка» и т. н. «ниши Хеопса». Исследования продолжаются.
Система передвижения
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).

Роботы BigDog
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах роботы передвигаются вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным или вертикальным плоскостям, по трубам используются системы, аналогичные «шагающим» конструкциям, но с вакуумными присосками.
Также известны роботы, использующие принципы движения живых организмов — змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.
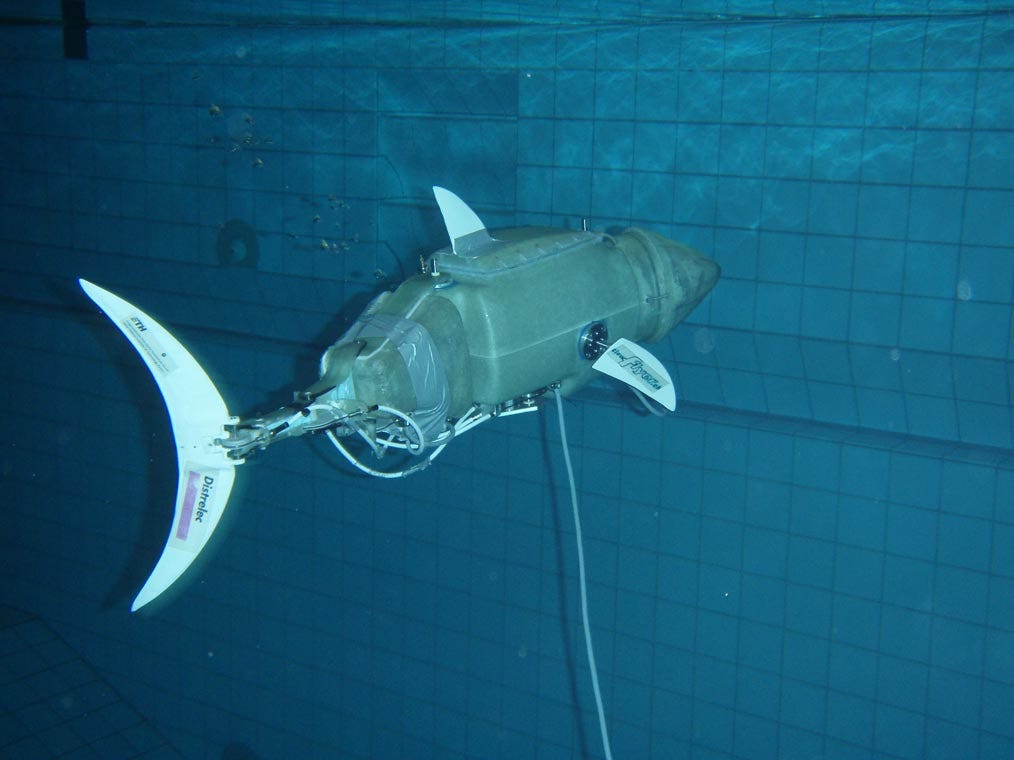
Робот Tuna
Система распознавания образов
Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
Двигатели
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.
Математическая база
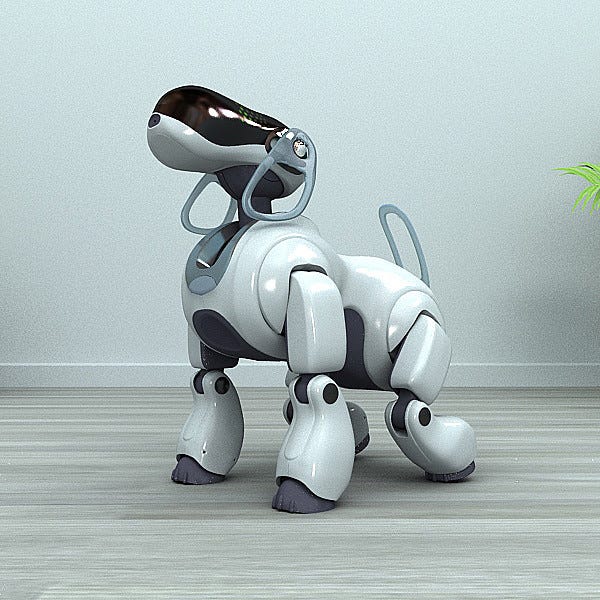
Робот Aibo
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.
Навигация
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).
Внешний вид
В Японии не прекращаются разработки роботов, имеющих внешний вид, на первый взгляд неотличимый от человеческого. Развивается техника имитации эмоций и мимики «лица» роботов.
В июне 2009 года ученые Токийского университета представили человекоподобного робота «KOBIAN», способного выражать свои эмоции — счастье, страх, удивление, грусть, гнев, отвращение — с помощью жестов и мимики.

Робот KOBIAN
Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Производители роботов
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших — iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Fischertechnik Robotics 544624 TXT Умный дом
Fischertechnik Robotics Smart Home — это настоящая система умного дома, но только для детей. Из 220 деталей можно собрать 6 разных сенсорных станций с движущейся камерой (которая может делать снимки), мониторингом окружающей среды и датчиками для измерения температуры, давления, качества, влажности воздуха и т. д.
Fischertechnik Robotics Smart Home — это настоящий умный дом в детском варианте
Конструктор программируется и контролируется с помощью программы ROBO Pro и контроллера ROBOTICS TXT. Он подключается к сети Wi-Fi, так что камерой можно управлять на расстоянии. Кроме того, контроллер подключается к облачному серверу, на котором сохраняются данные датчиков. Таким образом, можно постоянно контролировать данные и управлять движением камеры из любой точки мира.
| Рейтинг ZOOM | Рекомендуемый возраст | Особенности | Цена |
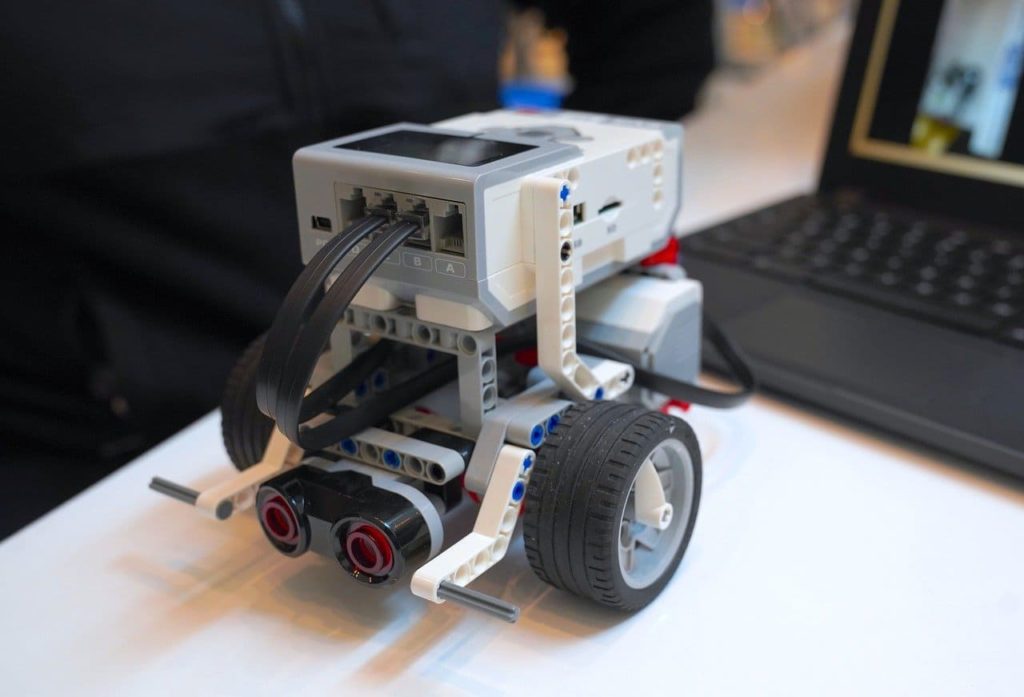
| 1. LEGO Education Mindstorms EV3 | От 10 лет |
Подключение к компьютеру, взаимодействие с мобильным приложением Двигатель, микрокомпьютер Датчик цвета ультразвуковой датчик |
От i31 000 |
| 2. Fischertechnik Robotics 544624 TXT Умный дом | От 10 лет |
Подключение к компьютеру Микрокомпьютер |
От i18 400 |
| 3. Makeblock Neuron Inventor Kit | От 6 лет |
Взаимодействие с мобильным приложением STEM |
От i14 490 |
| 4. UBTECH Jimu Robot JR0501 АстроБот | От 8 лет |
Взаимодействие с мобильным приложением С двигателем с микрокомпьютером |
i9990 |
| 5. Xiaomi Mitu Mi Robot Builder Rover | От 10 лет |
Взаимодействие с мобильным приложением Двигатель микрокомпьютер распознавание голоса Можно подключить датчик цвета инфракрасный датчик ультразвуковой датчик (не входят в комплект) |
От i5100 |
| 6. Амперка AMP-S026 Робоняша | От 12 лет |
Подключение к компьютеру С двигателем с микрокомпьютером на радиоуправлении |
i9990 |
| 7. LEGO Boost 17101 | От 7 лет |
Взаимодействие с мобильным приложением С двигателем с микрокомпьютером |
От i7000 |
| 8. Clementoni Mio the Robot | От 8 лет |
С двигателем с микрокомпьютером |
От i3100 |
| 9. Знаток 70707 Магия голоса | От 5 лет | Голосовое управление | i4780 |
| 10. Амперка AMP-S042 Робожук | От 8 лет |
С двигателем на радиоуправлении |
i1990 |
Печатная плата и электронные элементы
-
Программируемый контроллер Arduino Nano.
-
2 бесшумных шаговых двигателя TMC2130.
-
4 цилиндрических алюминиевых конденсатора на 10 мкФ.
-
1 конденсатор 1206 на 330 мкФ.
-
1 конденсатор 1206 на 100 мкФ.
-
1 линейный регулятор напряжения LM7805 TO-252.
-
2 диода Шоттки MDD SS14, DO-214.
-
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
-
2 четырёхштырьковые гнездовые колодки с JST.
-
1 трёхштырьковая гнездовая колодка с JST.
-
Источник питания: 7–35 В, мин. ток 1,5 A.
Шаг 1. Как создаётся художественная работа


Вначале я рекомендую посмотреть видео – вы поймёте, как ведёт себя робот в действии и как его настраивать для создания художественной работы. Говорят, изображение заменяет тысячу слов, и теперь представьте, сколько слов заменит видео, в котором изображения сменяют друг друга 30 раз в секунду!
Чтобы использовать робот для рисования, зажимами я закрепил на его раме чистый холст. Затем я подвесил рисующую головку и перебросил ремни через шаговые двигатели, расположенные на углах рамы робота, и отцентрировал рисующую головку (перевел её в домашнее положение). В рисующую головку вставил перманентный маркер. Затем подключил робот по USB-кабелю к компьютеру, на котором запустил управляющее программное обеспечение. В компьютер я загрузил чёрно-белое изображение, созданное в программе Photoshop, а затем разместил рисующую головку в том месте холста, откуда должна начаться прорисовка. Чтобы рисующая головка попала в нужное положение, я отправлял на робот команды перемещения в пределах ограничительной рамки и подгонял расположение изображения до тех пор, пока оно не оказалось именно там, где нужно. Затем я дал команду отправки изображения на робот.
Наконец, робот завершил свою работу – на холсте появилось чёрно-белое изображение. И вот настал момент, когда я смог почувствовать себя настоящим художником. Я взял обычную акриловую краску, разбавленную двумя частями клея для декупажа Mod Podge. В итоге я получил акриловую глазурь, которую нанес поверх чёрных деталей. Холст окрасился красивыми цветами, при этом все чёрные детали сохранились и благодаря глазури приобрели особый блеск.И вы можете создать нечто такое же, это потрясающе!
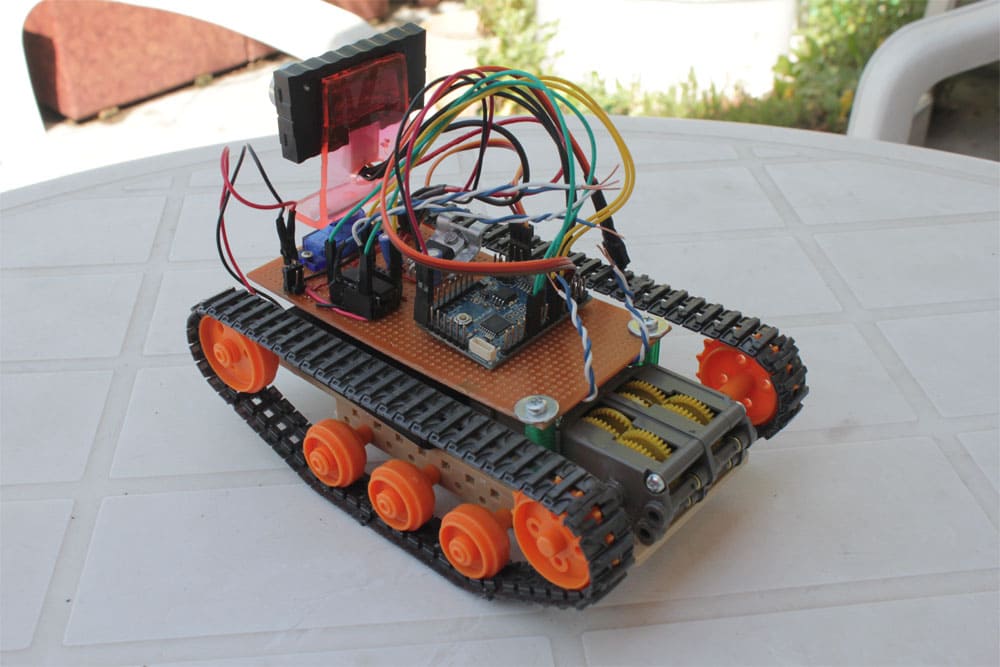
Робот, различающий препятствия
Прежде чем собирать смарт-устройство, подумайте о его внешнем виде и принципе движения. Лучше всего использовать гусеничную цепь (как в танке).
Этими роботами легче управлять, и они могут перемещаться по любому типу поверхности. С игрушечного танка можно снять гусеницы, двигатель и коробку передач.
Инструменты и запчасти
Перед изготовлением робота следует подготовить:
- диод 1N4004;
- кварцевый резонатор 16 МГц;
- гусеницы и двигатель игрушечного экскаватора, танка.
- сварщик;
- инфракрасные диоды (2 шт.);
- радиодетали;
- фототранзистор, способный реагировать на длину инфракрасных лучей;
- мультиметр;
- резисторы мощностью 25 Вт номиналом 10 кОм (1 шт.) И 220 Ом (4 шт);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- L7805 в корпусе ТО-220;
- микроконтроллер (ATmega 16 в корпусе Dip-40);
Работа с платой
Для питания микроконтроллера выбран стабилизатор напряжения. Оптимальный выбор — микросхема L7805, обеспечивающая на выходе стабильные 5 В, а также конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- пин сброса, подтянутый резистором на «плюсе» блока питания;
- кристаллический резонатор и конденсаторы, которые необходимо разместить рядом с выводами Xtal1 и Xtal2.
- электролит 1000 мкФ для защиты от перенапряжения;
Управление двигателями
В устройстве используется микросхема L293D со встроенными диодами, защищающими систему от перегрузки. Он имеет 2 канала, что позволяет подключать 2 мотора одновременно. Запрещается подключать двигатели на плате напрямую к МК. Контакт осуществляется через ключевые транзисторы.
Во время работы возможен нагрев микроэлектронного устройства. Для отвода тепла предусмотрены контакты GND, которые следует припаять к контактной площадке.
Установка датчиков препятствий
Ориентацию робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать инфракрасное поле, и фототранзистора для приема лучей. При отсутствии препятствия перед механизмом транзистор закрыт.
Когда он приближается к предмету мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует прохождение тока через цепь и заставляет устройство изменять свою траекторию.
Прошивка робота
Для работы прибора необходима программа, позволяющая снимать показания с датчиков и управлять моторами. Простые роботы пишут его на языке программирования C. Это набор функций, которые вызывают друг друга, дополняя друг друга.
При прописывании команд следует учесть, что согласно инструкции у робота 2 датчика. Если один из фототранзисторов получает свет от инфракрасного диода, механизм начинает двигаться назад, от препятствия. Он поворачивается и идет вперед.
Наличие препятствий необходимо проверять справа и слева, задавая с помощью команд. Алгоритм работы можно улучшить, указав в командной строке, что делать, если есть угроза прямого столкновения.
Доработать готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информационного наполнения установлен дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другая необходимая информация.
Что такое робот?
Существует множество определений робота и никакого реального консенсуса пока не достигнуто. Дадим такое определение робота:
Это означает, что тостер, лампа, или автомобиль не будет рассматриваться как роботы. Прежде всего они не имеют возможности воспринимать свое окружение. С другой стороны, пылесос, который может перемещаться по комнате или солнечная панель, которая направлена на солнце и изменяет угол наклона в зависимости от положения солнца, могут быть рассмотрены как роботизированные системы.
Важно также отметить, что “роботы” участвующие в войнах роботов, или какие-либо исключительно дистанционно управляемые устройства не подпадают под это определение. Скорее всего они будут ближе к более сложной радиоуправляемой машине
Также можно создать дистанционно управляемого робота на базе известных робототехнических конструкторов. Одним из таких конструкторов является Lego EV3.
Это определение является достаточно общим. Хотя оно может понадобиться в будущем для того чтобы понимать самые последние достижения в этой области. Робототехника в наше время стремительно развивается. Следовательно будет требоваться все больше специалистов для разработки, наладки, программирования и обслуживания роботов и роботизированных линий.
Есть 10 статей.
Каждая статья проведет вас через один шаг к созданию универсального мобильного робота. Это позволит вам создать своего собственного мобильного робота для выполнения задач по вашему выбору. Каждый урок будет проиллюстрировано примером из опыта. Статьи предназначены для того, чтобы быть изучены одна за другой и опираются на информацию, полученную раньше.
Робот из картонных коробок
Если не выбрасывать картонные коробки, а собрать их в достаточном количестве, то можно подбросить ребенку идею сделать чудного робота своими руками. Для работы приготовьте такие материалы:
- три коробки из картона разных размеров;
- фигурную упаковку от какой-нибудь запчасти;
- две круглые формы для кексов из фольги;
- синельную проволоку;
- два картонных рулона от пищевой фольги;
- две основы от новогодней хлопушки;
- две бобины от скотча;
- два CD-диска.

Приступаем к сборке нового изделия. Прежде всего, коробки следует вывернуть наизнанку, чтобы убрать с глаз долой различные надписи. Можете не выворачивать, но тогда придется обклеить коробки цветной бумагой или фольгой. Самую маленькую коробку – голову – соединяем с самой большой – туловищем при помощи бобины от скотча – шеи. Можно воспользоваться клеем, а можно работать двусторонним скотчем.

Теперь приделываем роботу штанишки – к туловищу приклеиваем коробку средних размеров.
Руки – рулоны от пищевой фольги – и ноги – основы от новогодних хлопушек – привязываем веревками. Посередине на грудь приклеиваем для объемности фигурную упаковку, а штанишки украшаем двумя дисками.

На лицевой стороне головы прорезаем два круга и вставляем в отверстия формы для кексов – это наши глаза. Рот и сигнальные антенны на макушке делаем из закрученной проволоки.

Оставшуюся бобину из-под скотча разрезаем пополам и приклеиваем по бокам головы – это уши нашей игрушки.

Если малышу захочется, он может украсить своего нового друга аппликацией и даже на следующий день отнести в детский сад, чтобы похвастаться перед одногодками.

Робот из «Лего»
«Лего» — серия игрушек для детей, которая состоит в основном из деталей конструктора, соединяющихся в один элемент. Детали можно комбинировать, при этом создавая все новые и новые предметы для игр.
Собирать подобный конструктор любят практически все дети от 3 до 10 лет. В особенности детский интерес увеличивается, если из деталей можно собрать робота. Итак, чтобы собрать двигающиегося робота из «Лего», необходимо приготовить детали, а также миниатюрный мотор и блок управления.
К тому же сейчас продаются готовые наборы с деталями, позволяющие собрать самостоятельно любого робота. Главное — освоить приложенную инструкцию. К примеру:
- готовим детали, как указано в инструкции;
- прикручиваем колеса, если они есть;
- собираем крепления, которые будут служить поддержкой для моторчика;
- вставляем в специальный блок батарейку или даже несколько;
- устанавливаем двигатель;
- подключаем его к мотору;
- загружаем в память конструкции специальную программу, которая позволяет управлять игрушкой.
Как создать робота?
Когда речь заходит о роботах, мы представляем себе гигантскую машину с искусственным интеллектом, как в фильмах про Робокопа и т. д. Однако робот не обязательно должен быть большим и технически сложно сделанным устройством. В этой статье мы расскажем, как создать робота в домашних условиях. Сотворив собственного мини-робота, вы убедитесь, что никаких специальных знаний и инструментов для этого не потребуется.
Робот из консервной банки с магнитом
Увлекательные игры для развития детей разрешается проводить, пользуясь пустыми консервными банками. Также подойдут небольшие магниты, болтики, крышки из-под бутылок и другие приспособления.
Из каких же элементов можно сделать самостоятельно интересные поделки роботов. Ребёнок от такого будет в восторге. Основная часть поделки — это консервная банка. К ней будут присоединены разные части тела.
Для лёгкой смены деталей на теле, присоедините к ним магниты на клей. Когда ребёнок хочет что-то взять, достаточно лишь поднести маленькую банку к предмету, и всё примагнититься к ней.
Если предоставить творческому чаду необходимый запас материала для опытов, он сможет сделать самых различных роботов. Осталось только запастись терпением и можно приступать к работе.
Смешные роботы — поделки готовы! С такими игрушками дети будут увеличены ими долгое время.
Как делать робота — пошаговые инструкции.
Нам нужны колеса или в случае их отсутствия прикрепить к стержням моторчиков крышки от пластиковых бутылок. Можно это сделать клеем, ну или вдавливанием головки в отверстие. Можно использовать паяльник — лучше будет держаться.
Пластиковые бутылки чаще всего изготовлены из полиэтилена, их обычных клеем не приклеишь. Отлично подойдет клеевой пистолет.

Напоминаю, что и колеса и моторчики лучше взять одинаковые. Иначе робот не будет ездить прямо. На картинке моторчики разные и вряд ли этот робот ездит по прямой, скорее всего — кругами.
Теперь при помощи клейкой ленты нужно один из моторчиков прикрепить к спичечной коробке. Крепление должно быть лишь на половину размера коробки, так как на другой части будет еще и второй моторчик.

Цепляем изолентой второй моторчик с колесиком с другой стороны коробки.

Поскольку наши моторчики находятся в нижней части спичечной коробки, то на верхнюю нужно поместить батарейки, естественно скрепив все клейкой лентой. Также добавляем выключатель.

Все скрепляем изолентой, и смотрите, что у нас получилось в конце-концов.

Я взял за основу эту конструкцию и попытался ее повторить. Вот, посмотрите общий вид моего робота, как он у меня получился.

В самом конце статьи будет видео, а пока я сделаю несколько замечаний, которые появились в процессе моей работы над конструкцией.
Первое по самому видео. Я снимал на мощную вэбкамеру, но взял для нее слабенький нетбук, который постоянно перегружал свой процессор.
Сразу не было заметно, но при обработке ролика звук стал заметно гулять. Как смог, я поправил, но кое-где звук не совпадает. Однако, все понятно, я думаю, что я там делаю в кадре.
И по самой конструкции. Все вполне работоспособно, и простора для фантазии хоть отбавляй. Можно, например, одну батарейку подсоединить, ставить другие колеса и пр. Дерзайте!
Простой бумажный робот
Чтобы создать поделку робот из бумаги необходимо запастись следующими материалами:
- схема робота;
- лист бумаги;
- ножницы;
- клей.

Помимо того может понадобится также картон, иголка или шило, фломастеры и резинки для соединения частей.

На схемах можно увидеть несколько типов линий. Разрез ножницами предусмотрен по сплошной линии. Пунктирные очертания предназначены для сгибания бумаги.

При необходимости сделать отверстия, используете иглу или канцелярский нож до вырезания макета. Для наглядного представления готовой игрушки согните все части по пунктирным линиям, как видно на фото поделки робот.


Поделку робот из картона делают так:
- сделать распечатку схемы на картоне;
- ножницами вырезать все части схемы, действуя по инструкции;
- вырезанные детали сгибаем по пунктирным линиям;
- соединяем необходимые части с помощью клея;
- делаем сбор всех деталей робота в одну бумажную конструкцию, следуя инструкции.

Что необходимо для занятий домашней робототехникой

В технической части следует иметь рабочее место, паяльник, припой, канифоль и элементы, что будут использоваться в схемах. С точки зрения теории необходимо знать, что и как соединяется, чтобы получить желаемый результат. С последним могут быть определённые проблемы, но тогда к вашим услугам интернет, где можно попросить совета и получить его, чтобы приблизить момент, когда домашний робот сможет выполнять поставленные перед ним задачи. Данная тема является довольно популярной, поэтому найти ответ на свой вопрос или задать его на специализированном сайте не составит труда. А сейчас давайте рассмотрим примеры домашних роботов-помощников.
Материалы
Минимальный набор:
— Могут потребоваться листы пластика различной толщины и размера.
Этот материал можно легко разрезать ножницами и может быть согнут и сформирован, по мере необходимости. Он используется для создания рамы или других компонентов вашего робота без необходимости выполнять механическую обработку.

листы пластика
— Картон. Картон (толстый, но все еще разрезаемый с помощью ручных инструментов) может быть легко использован для изготовления рамы или прототипа. При помощи картона и клея можно изготавливать различные конструкции.
— Тонкая фанера — отличный материал для работы. Фанеру можно закреплять при помощи винтов, шурупов, склеивать, шлифовать и так далее.
Профессиональный набор может включать в себя:
— Полиморфус.
Собрать робота можно при помощи полиморфуса. Это пластик для различных целей — его используют как обычный пластилин, но он имеет свою уникальную особенность.

полиморфус
При небольшом нагреве (в горячей воде) он размягчается, а потом, при остывании — застывает и становится очень твердым. В результате это позволяет создавать пластиковые детали без хлопот для создания различных форм.
— Листовой металл. Если у вас есть металлообрабатывающие станки, то листовой металл является отличным материалом для рамы робота. Он долговечен, гибок и устойчев к ржавчине.
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

Сдача советника – включайтесь в работу!
Этап сдачи работы – самый сложный. Будьте уверены, каждый исполнитель с горя пьет успокоительный отвар, черным маркером отмечая день календаря, когда его в очередной раз просят поправить и без того исчерпавший все сроки заказ. Как и вселенной, совершенству нет предела, но в определенный момент нужно собраться и сказать – задача завершена.
Понимаю, для трейдера свет, отраженный от золотых гор, освещает создание передовой технической мысли и плода внутреннего гения в его безмерно красивом представлении. Как так, ведь советник, который не зарабатывает деньги, просто не укладывается в голове, и создает образ незавершенной работы. Как можно платить за то, что не работает?

Со стороны исполнителя же работа завешена ровно тогда, когда исполнены все пункты заказа. Техническое задание для программиста – это четко проведенная тропа, отходить от которой значит додумывать за заказчика. Иногда эта тропа заводит в тупик, как дорога из бывшей столицы Руси в либеральную Европу. То есть, на этапе приема работ выясняется, что задача, оказывается, состояла совсем не в том, а в кардинально обратном.
Если задача небольшая, исполнитель вполне может пойти на уступки, и исправить работу в соответствии с новым ТЗ. Если работа проделана масштабная – что-либо менять уже поздно. Частая проблема – тотальная отрешенность в процессе разработки, например, отказ от участия в бета-тестировании: «Зачем вы мне скинули советника с ошибками, я что за вас тестировать еще должен?» или: «Откуда я знаю, как этот ваш тестер запускать, я программист что-ли?».
[info_block align=»right» linkText=»Безопасный Мартингейл» linkUrl=»https://fortrader.org/learn/forex-trader/bezopasnyj-martingejl-kak-otdelnymi-elementami-martingejla-uvelichit-pribylnost-strategii.html» imageUrl=»http://files.fortrader.org/uploads/2016/07/coins-730×487.jpg»]Как отдельными элементами Мартингейла увеличить прибыльность стратегии?
Для адекватного человека такие заявления режут слух, исполнитель же впадает в депрессию. Разработка торгового робота – это, в первую очередь, работа. Если вы ищете готовое решение, существует магазин готовых советников, где советника за вас и протестируют, и вымоют до блеска, попутно документируя его историческую успешность. В таком случае, обращаться на фриланс-биржу не имеет смысла.
Мораль: не стоит отдавать все на самотек. В ваших интересах контролировать процесс создания советника вашей мечты. Просите проводить промежуточные этапы работ, участвуйте в бета-тесте и не брезгуйте узнавать технические подробности.
Основной строительный материал
Например, изготовление робота из картона. Некоторые из самых основных строительных материалов могут быть использованы для создания отличных каркасов. Одним из самых дешевых и наиболее доступных материалов является картон. Вы часто можете найти картон бесплатно, и его можно легко вырезать, согнуть, склеить и сложить.
 робот из картона
робот из картона
Может быть вы можете создать усиленную картонную коробку, которая выглядит намного более красиво. И она соответствует размеру вашего робота. Затем вы можете нанести эпоксидную смолу или клей, чтобы сделать ее более долговечной. В заключение дополнительно можно разукрасить ее.
Плоский материал для конструкции
Один из наиболее распространенных способов сделать раму – это использовать стандартные материалы, такие как лист фанеры, пластика или металла. И просверлить отверстия для подключения всех исполнительных механизмов и электроники. Прочный кусок фанеры может быть довольно толстым и тяжелы. В то самое время как тонкий лист металла может быть слишком гибким.
Например, доску или фанеру из плотной древесины можно легко разрезать с помощью пилы, просверлить (не опасаясь разрушения), покрасить, отшлифовать и т.д. Следовательно вы можете устанавливать устройства с двух сторон. Например, подключить двигатели и колесики колес к нижней части, а электронику и аккумулятор к верхней части. При этом древесина останется неподвижной и твердой.
Лазерная резка, изогнутый пластик или металл
Если вы находитесь на том этапе, когда вам необходим внешний блок, то лучшим вариантом будет высокоточная резка деталей лазером. Любая ошибка в расчетах будет дорогостоящей и приведет к порче материалов. Для изготовления робота нужна собственная мастерская. Возможно нужно найти компанию, производящую такой тип роботов. Может быть она предлагает множество других услуг, включая работы с металлом и покраску.
3D-печать
3D принтер, печатающий раму или каркас, редко бывает наиболее обоснованным решением (потому что он печатает послойно). В результате этого процесса можно создавать очень сложные формы. Такие формы было бы невозможно (или очень сложно) изготовить другими способами.
 3D принтер
3D принтер
Отдельная трехмерная печатная деталь может содержать все необходимые монтажные точки для всех электрических и механических компонентов. При этом способе изготовления каркаса сохраняется незначительный вес изделия. Изготовление робота потребует дополнительной обработки и шлифовки.
Поскольку 3D-печать становится более популярной, цена на детали также снижается. Дополнительно преимуществом 3D-печати является не только то, что ваш дизайн легко воспроизводить, но и им легко делиться. При помощи нескольких кликов мышки можно получить все инструкции по дизайну и файлы САПР.
Полиморф
При комнатной температуре полиморф является твердым пластиком. При нагревании (например, в горячей воде) он становится податливым и может быть сформирован в сложные детали. Затем они охлаждаются и затвердевают в прочные пластмассовые детали.

робот из полиформа
Обычно пластиковые детали требуют высоких температур и необходимы различные формы для изготовления. Изготовление робота таким способом делает их недоступными для большинства любителей. Например, вы можете комбинировать различные формы (цилиндры, плоские листы и т.д.).
Так формируются сложные пластмассовые структуры, которые выглядят как сделанные промышленным способом. Вы также можете экспериментировать с различными формами и достичь с помощью этого материала многого.
Робот из крышечек
Довольно интересным получится робот из пластиковых крышечек. Благодаря резинке, скрепляющей все элементы, у него будут двигаться руки и ноги. Предлагаем подробный мастер-класс изготовления трансформера из 22 крышечек:
- Для каждой ноги понадобится по 4 крышечки. В первых двух делаем отверстие горячим шилом посередине, в третьей – в донышке, но ближе к краю, а в четвертой проделываем сразу два отверстия – в центре и сбоку.
- В резинку с одной стороны вдеваем иголку, а с другой затягиваем плотный узел.
- Продеваем две крышки с центральным отверстием, затем идет крышка со сдвинутым центром и крышка с дырой в боковине. Завязываем резинку на узел.
- По этой же схеме собираем вторую ногу.
- Для изготовления руки проделываем в трех крышечках отверстия по центру, а в четвертой – сбоку.
- Вначале протягиваем иголку с резинкой в крышечку с боковым отверстием, затем поочередно – с центральными. Затягиваем резинку на узелок.
- Для головы нам понадобится одна крышечка и один колпачок от тюбика из-под зубной пасты. Для туловища – пять крышечек. В двух из них делаем отверстия по центру, в двух других – по два симметричных отверстия по бокам, а в пятой – сразу три отверстия по центру и по бокам.
- Стягиваем резинкой крышечку-голову, колпачок от зубной пасты и крышечку с тремя отверстиями. За ними идет крышечка с двумя отверстиями и крышечка с одни отверстием. Две оставшиеся крышечки – плечи – продеваем резинкой в боковые отверстия на туловище.
- В крайних крышечках рук проделываем по одному боковому отверстию. Пропускаем резинку сквозь него, затем через плечо и крышечку с тремя отверстиями. Далее – вторая крышка плеча и крайняя крышка второй руки.
- Через боковое отверстие в ноге пропускаем резинку, далее она проходит сквозь боковые отверстия нижней крышечки туловища, сквозь боковое отверстие во второй ноге и стягивается.

В принципе, наш робот-трансформер готов. Осталось только добавить ему глаза. Можно сделать отверстия в крышечке-голове, аппликацию или приделать их из пластилина. Роботу понадобится гранатомет. Для этого прекрасно подойдет колпачок от шариковой ручки. Его можно прикрепить к руке, поместить за спину или поставить на плечо.